Moorings
|
| Device |
Description |
Device |
Description |
|

|
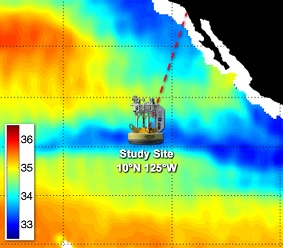
The SPURS central mooring consisted of a surface meteorological package, surface oceanographic instruments, and subsurface, non-real time oceanographic instruments including CTD, ADCP sensors and point current meters providing continuous series of temperature, salinity and current profile data. Meteorological observations included wind speed, air temperature, precipitation, and radiative flux. The mooring was deployed in 4769 m depth of water on 24 August 2016, at 10°03.0481'N, 125° 01.939'W, and was recovered on November 11, 2017. |

|
Two PICO moorings (PMEL 9N and 11N) were deployed on the Revelle cruise in September 2016 in northern and southern domain quadrants at 9° 2.830N, 124° 59.833W and 10° 59.0498N 124° 57.531W respectively. These moorings contained a surface meteorological package and a "prawler", a CTD that crawls up and down the mooring line from 4-450m, yielding time series of salinity and temperature profile data at fixed locations (nominally 8 profiles per day). The moorings were recovered on the second Revelle cruise (Oct. 22 & Nov. 2, 2017). |
| SPURS Mooring |
Contributor: T.Farrarr (WHOI)
Data Access
|
PICO Moorings |
Contributors: C. Zhang & W. Kessler (NOAA/PMEL)
Data Access |
Ship-based Samplers
|
| Device |
Description |
Device |
Description |
|

|
Shipboard lowered CTD probes provide continuous conductivity, temperature and pressure vertical profile observations at fixed sampling stations. There were 50 and 14 CTD casts made during the first and second Revelle cruises respectively. All continuous profile CTD data were calibrated using shipboard salinometers according to IAPSO standard seawater. |

|
Acoustic Doppler Current Profilers (ADCP) provide water column current velocity profile observations. Shipboard ADCP data were collected during the two Revelle cruises, using 150 kHz and 75 khz broadband and narrowband instruments. Additionally, lowered ADCP (L-ADCP) measurements were made on CTD cast at 0.5 degree intervals during the R/V Revelle cruise. |
| CTD |
Contributor: J. Sprintall (UCSD/SIO)
Data Access |
ADCP |
Contributors: J. Sprintall (UCSD/SIO)
Data Access |
|

|
Underway-CTD (UCTD) is a profiling CTD instrument providing salinity and temperature observations from the surface to 500m while underway at up to 12 kts. A total of 262 and 501 uCTD casts were performed during the first and second Revelle cruises respectively. |

|
Expendable bathythermographs (XBT) are small, single use probes that are launched over the side of vessels. They measure water temperature continuously to depths of up to 1100m, providing vertical profile data of water column temperatures at fixed locations. During SPURS-2, XBTs were deployed during both Revelle cruises, a total of 25 and 11 in the first and second cruises respectively. |
|
Underway-CTD
|
Contributor: J. Sprintall (UCSD/SIO)
Data Access |
XBT |
Contributor: J. Sprintall (UCSD/SIO)
Data Access |
|

|
A thermosalinograph (TSG) and underway surface profiling system (USPS) are automated measurement systems coupled to a research vessel's water intake and GPS systems. They provide continuous, along-track surface temperature and salinity measurements at depths of 2, 3 and 5 m using through-hull ports in the bow of the ship. Each SPURS-2 cruise had a USPS/TSG instrument, with measurements calibrated against onboard salinometers. |

|
The Salinity Snake (SS) measures sea surface salinity in the top 1-2 cm of the water column, which is the radiometric depth of L-Band satellite radiometers such as on Aquarius/SAC-D, SMAP and SMOS satellites that measure salinity remotely. The SS consists of four key components: a 10m boom/mast, a hose, which is deployed from this boom, a powerful self-priming peristaltic pump which transports a constant stream of a seawater/air emulsion, and a shipboard apparatus, which filters, de-bubbles, sterilizes and analyses the salinity of the water. The SS was deployed during both SPURS-2 Revelle cruises. |
| Thermosalinograph |
Contributor: W. Asher (APL/UW)
Data Access |
Salinity Snake |
Contributor: J. Schanze (ESR)
Data Access |
|

|
A ship mast meteorological sensor package with an additional set of sophisticated sensors, including a direct covariance flux package was set up on both SPURS-2 Revelle cruises. These provided georeferenced, along-track atmospheric pressure, temperature, humidity, IR/visible radiation, rain, and wind speed and air-sea flux measurements. |

|
A Rawinsonde is a helium balloon carrying meteorological instruments and a radar target, enabling the velocity of atmospheric parameters to be measured. During the first Revelle cruise, rawinsondes were launched every 6-hours, providing a total of 85 profiles of temperature, humidity, wind speed and direction through the marine atmospheric boundary layer within the SPURS-2 domain. Similarly, during the second Revelle cruise, rawinsondes were deployed four-times daily within the study area over the 3-week period. |
| Meteorology |
Contributors: C.A Clayson & J. Edson (WHOI)
Data Access |
Rawinsonde |
Contributors: C.A Clayson, J. Edson (WHOI; cruise 1) and S. Rutledge (CSU; cruise 2)
Data Access |
|

|
Bio-optics underway and profile measurements from the second SPURS-2 Revelle cruise provide data on phytoplankton diversity and community structure at high spatial resolution. Bio-optical properties of water from the 5m intake port and Salinity Snake were measured using two flow-through systems, a WetLabs BB3 scatterometer run inline with a colored dissolved organic matter (CDOM) fluorometer, and a McLane Imaging FlowCytobot (IFCB). Additionally, discrete samples for flow cytometric analysis, DNA extraction and pigment determination were collected at the surface and from CTD casts. |

|
A-Sphere spectrophotometer: Approximately 25 casts of the a-sphere spectrophotometer were performed onboard the Revelle during the second SPURS-2 cruise to measure the optical absorption by seawater.
|
| Bio-optics |
Contributor: S. Clayton (UW)
Data Access |
A-sphere
|
Contributor: C.A Clayson & J. Edson (WHOI)
Data Access |
|

|
Underway pCO2/DIC/pH measurements. During both Revelle cruises, continuous measurements of the partial pressure of CO2 (pCO2), dissolved inorganic carbon (DIC), pH, and dissolved oxygen (DO) were made on water pumped continuously from the Salinity Snake and the ship’s intake port. The temporal resolution of the observations range from 3 seconds (pH) to 3 minutes (DIC). |

|
Underway physical data from schooner Lady Amber cruises during the SPURS-2 field campaign include along–track meteorological, salinity snake and fixed-hull CTD measurements at 1m and 2 m intake depths. Comparisons with nearby Revelle data facilitate evaluation of uncertainties arising from collecting data from a sailboat, and the characterization of small-scale spatial variability in the ocean and atmosphere. |
| pCO2/DIC/pH |
Contributor: D. Ho (U. Hawaii)
Data Access
|
Lady Amber |
Contributor: L. Rainville (APL/UW)
Data Access |
|

|
The Remote Ocean Surface Radiometer (ROSR) is a self-calibrating system incorporating a pitch-roll sensor that provides sea-surface skin temperature (SSST) measurements in support of air-sea interaction studies or satellite calibration and validation activities. A measurement cycle completes in 285 seconds and involves the ROSR scan drum pointing at a variety of angles. This allows for correction of reflected sky radiance in the downward looking view. ROSR was successfully deployed during the first SPURS-2 Revelle cruise, resulting in a 10260 point time series from 2016-08-14 to 2016-09-20. |

|
The towed Surface Salinity Profiler (SSP) platform is a converted paddleboard with a keel and surfboard outrigger that is tethered to the ship and skims the sea surface beyond the ship’s wake. Below the paddleboard are salinity and temperature sensors at depths of 10, 30, 50 and 100cm, and microstructure sensors that measure turbulence. The SSP was deployed 19 times throughout the first SPURS-2 cruise, totaling over 200 hours of measurements, and a further 15 times during the 2017 cruise. SSP deployment is most informative when there is a rain event leading to near-surface ocean stratification. The SSP then measures how the ocean changes over the periods before, during, and after rain, and how rainwater mixes into the ocean during recovery. |
| ROSR |
Contributor: A. Jessup (APL/UW)
Data Access |
SSP |
Contributors: K. Druska, W. Asher (APL/UW)
Data Access |
|
|
WaMoS is a radar-based wave and surface current monitoring system providing wave field imagery and station time series or along track data series for key wave parameters in near near-real time. The WaMoS wave radar instrument was available during the second Revelle cruise of SPURS-2. It provided along track wave measurements over the duration of this cruise for the following essential wave field parameters: wave period, wavelength, and wave direction, as well as surface current speed and direction. |

|
The SEA-POL (seagoing-polarimetric) radar is a C-band, Doppler polarimetric radar system, first deployed during the second SPURS-2 Revelle cruise. SEA-POL’s 1-degree beam width antenna, antenna mounted receiver and positioning system are set on top of the radar and enclosed in a high performance radome located in the inner-starboard seatainer position on the forward deck. The peak power of 250 kW transmitter covered a 240-degree sector centered on the ship’s bow. SEA-POL was used primarily to map rainfall.
|
| WaMoS |
Contributor: K. Druska (APL/UW)
Data Access |
SEA-POL |
Contributor: S.A. Rutledge (CSU)
Data Access |
|

|
The ODM-470 disdrometer system aboard the ship was used to quantify rain rate and approximate rain drop size distribution information during both SPURS-2 cruises. Resulting data include time series or rain rate and drop size distribution, though the smallest drops < 0.5 mm are not well characterized due to inherent instrument noise issues. Instrument image is credited to www.eigenbrodt.de
|

|
The Controlled Flux Technique (CFT) is a system for measuring the net heat transfer velocity and turbulent kinetic energy (TKE) dissipation at the ocean surface, and is a useful tool for studying the turbulence generated at the ocean surface by the impact of raindrops. CFT was employed during both SPURS-2 Revelle cruises. It involves a laser heating a small patch of water on the ocean surface, and the IR imaging camera then tracking the resulting thermal decay. This decay is known to be proportional to the dissipation of TKE at the water surface, which in turn can be used to scale the transfer velocity for the net heat flux. |
| Disdrometer |
Contributor: E. Thompson (APL/UW)
Data Access
|
CFT |
Contributor: W. Asher (APL/UW)
Data Access |
 |
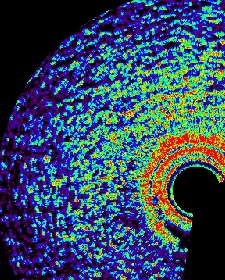
The X-band radar system aboard the Revelle was used to monitor and quantify rain events during both SPURS-2 cruises. Resulting data include radar imagery and derived rain area classification products.
|
|
|
| X-band radar |
Contributor: E. Thompson (APL/UW)
Data Access
Data Access |
|
|
Autonomous & Lagrangian Samplers
|
| Device |
Description |
Device |
Description |
|

|
A Waveglider is an autonomous platform propelled by the conversion of ocean wave energy into forward thrust and employing solar panels to power instrumentation. For SPURS-2, sensors included a CTD at the near-surface and another at 6 m depth, providing continuous salinity and temperature observations plus air temperature and wind measurements. Three wavegliders (ASL22, 32, 42) were deployed from the Revelle in August 2016 and again in November 2017 before final retrieval at the conclusion on the second cruise. Waveglider trajectories followed a 20x20km square loop around the moorings and a butterfly pattern around the neutrally-buoyant float. |

|
The Seaglider is an autonomous profiler measuring salinity and temperature. Three Seagliders were deployed on the first Revelle cruise in August 2016, recovered by the Lady Amber after 7 months and redeployed, to be retrieved finally during the second cruise in November 2017. One of the Seagliders deployed alongside and tracked the Lagrangian array across the study region, diving to depths of 1000m. |
|
Waveglider
|
Contributor: B. Hodges (WHOI)
Data Access |
Seaglider
|
Contributors: L. Rainville (APL/UW)
Data Access |
|

|
A drifter is passive Lagrangian platform consisting of a surface buoy and tethered subsurface drogue. Buoys contain GPS and satellite data transmitters, with sensors measuring temperature and other properties. A range of drifters were deployed during both Revelle SPURS-2 cruises. These included: standard Surface Velocity Program (SVP) drifters with salinity sensors added (SVP/S), Surface Contact Salinity drifters, SURPACT drifters, CODE and ADOS drifters. |

|
The Ecomapper or IVER is a portable autonomous underwater vehicle (AUV) capable carrying a range of sensor payloads. For SPURS-2 these included CTD, chlorophyll, oxygen and turbidity sensors. Ecomappers were deployed on two occasions during the second Revelle cruise, 30 and 31 October 2017. |
|
Drifter
|
Contributors: L. Centurioni, V. Hormann, G. Reverdin, A. Hasson, A. Supply (USCD/SIO, IFREMER)
Data Access |
Ecomapper
|
Contributors: B. Hodges (WHOI)
Data Access |
|

|
Part of the Argo global network of autonomous, self-reporting samplers, Argo floats drift horizontally and move vertically through the water column generally on 10 day cycles, collecting high-quality temperature and salinity profiles from the upper 2000m. During the first SPURS-2 Revelle cruise, 15 profiling floats were deployed, 10 of which are regular US Argo floats, with the remaining 5 being US Argo floats equipped with Surface Temperature and Salinity (STS) and Passive Aquatic Listener Sensors (PALS) that measure rainfall and wind speed during times when the float is not profiling. During the second cruise in the fall of 2017, 11 Argo floats were deployed, 2 of which were a new design built for the Tropical Pacific Observing System (TPOS) pilot program, that additionally carried sensors for dissolved oxygen, chlorophyll fluorescence and particle backscatter, and a hydrophone for ambient acoustic noise measurements used to estimate wind speed and rainfall. |

|
Neutrally buoyant floats (also known as Mixed Layer Floats - MLF) drift and move through the water column providing continuous temperature and salinity profiles via 2 integrated CTDs and GPS surface position location data. One float was deployed in SPURS-2 during the first Revelle cruise in August 2016 and recovered in December 2016 after 3.5 months about 1800 km east of the central mooring. |
|
Argo Float
|
Contributor: S. Riser, J. Yang (U.Washington)
Data Access |
Neutrally Buoyant Float
|
Contributors: A. Shcherbina (APL/UW)
Data Access |
|

|
Saildrone is a state-of-the-art, remotely guided, wind and solar powered unmanned surface vehicle (USV) capable of long distance deployments lasting up to 12 months. It is equipped with a suite of instruments and sensors providing high quality, georeferenced, near real-time, multi-parameter surface ocean and atmospheric observations while transiting at typical speeds of 3-5 knots. In SPURS-2, two saildrones were deployed over the period of the second Revelle cruise. |
|
|
|
Saildrone
|
Contributors: D. Zhang (NOAA/PMEL)
Data Access |
|
|
Satellite Observations
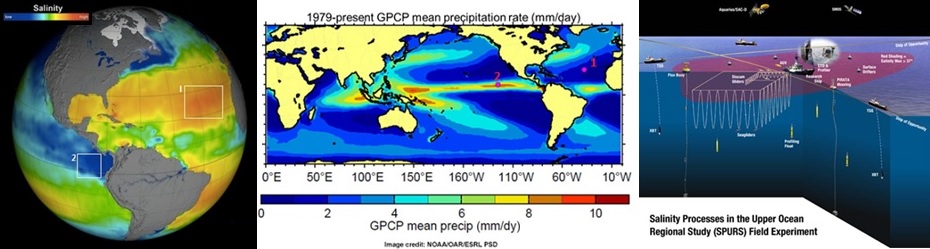
Complementary, broad-scale measurements of remotely sensed sea surface salinity over the SPURS-1 domain are provided by the AQUARIUS/SAC-D and SMOS satellite missions.
|
| Device |
Description |
Device |
Description |
|
|
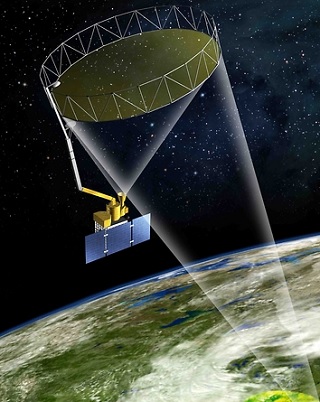
Launched on January 31, 2015, the NASA Soil Moisture Active Passive (SMAP) mission was designed to principally measure soil moisture and freeze/thaw state from space . The mission is, however, building upon the legacy of Aquarius/SAC-D in also delivering derived sea surface salinity (SSS) observations for the world’s oceans given its highly sensitive radiometer operating at 1.41GHz and ability to provide global coverage in 3 days. The SMAP satellite is in a near-polar orbit at an inclination of 98 degrees and an altitude of 685 km. It has an ascending node time of 6 pm, is sun-synchronous, and has an exact orbit repeat cycle of 8 days. Both orbital/swath L2 and gridded L3 products are available from the PO.DAAC. |

|
ESA’s SMOS (Soil Moisture & Ocean Salinity) satellite mission launched November 2009, providing over 5 years of global sea surface salinity observations. The SMOS MIRAS radiometer is an L-band passive microwave 2D-interferometer, with a, spatial resolution of 35 km (at center of the 1000km field of view) and a 3 day Equatorial temporal repeat cycle. SMOS salinity L2, L3 and L4 products are available. |
|
SMAP
|
Agency: NASA
Data Access |
SMOS
|
Agency: ESA
Data Access |